Single Pivot
The Single Pivot is the most widely used method to include rear suspension in bicycle frame design. If built correctly, this system will have the highest rigidity, durability, and versatility of any 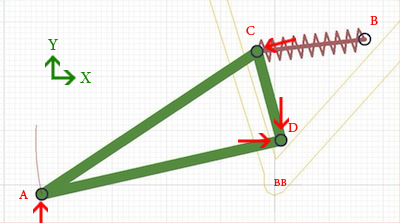 design currently on the market.
design currently on the market.
Single pivots were the first type of suspension to become widely available for a bicycle. It is simple, elegant, and requires very little maintenance (the epitome of an engineered solution). The only design parameters necessary (besides building it strong enough) is the location of the main pivot (Point D), both shock mount positions (Points C and B), and the length of the swing arm.
As can be easily seen, the suspension works by using a large triangle (the swing arm) to transfer upward forces from the wheel to lateral forces into the shock. The amount of travel, at-axle spring rate, wheel path, pedal-jack, and brake jack depend on the dimensions between all of the above points.
The forces on the swing arm are marked in red arrows at the points that make up the triangle. The wheel places a positive torque at length AD. The shock will provide an opposing negative torque. The forces from the main triangle on the pivot point at Point D will have a negative vertical component and a positive horizontal component.
The spring constant (as explained on the Designs page) will be concave up, allowing for a buttery smooth ride regardless of where the suspension is at in its travel.
The wheel path here is concentric to the pivot at Point D. Because the pivot is above the bottom bracket, (marked BB on the image), the wheel path will have an up and rearward path early in the suspension path, and will become vertical deep into the travel. Bump feedback is an issue here, and the rider will feel an ease in pedaling as the suspension absorbs a bump.
