Robotic Arms, Introduction
In the field of robotics there are many challenging areas. Walking is something that is very complicated for robots to do as it involves a sense of balance and a lot of small movements and adjustments to make it work. However, the futuristic dream of robots living along side us is still far away. Current robots are developing some of the basic traits that we deem necessary, such as human like movement and problem solving. The area of robotics we will be taking a closer look at today is that of the robotic arm.
A robotic arm is simply some appendage that moves and is controlled by a predefined pattern. An example of this would be assembly robot arms. The machines that assemble cars and electronics are some of the most widely used robotic arms. There is also a robot arm on the International Space Station, which is used for repair work and moving of payloads around the space station. Maybe the most futuristic robotic arm is that of the prosthetic limb. These can be seen in movies as near human machines; currently however, they are simple mechanical devices with further from human movement.
Just like human arms, there are different types of joints that robot arms can have. A
typical robot arm can move in a rotational motion. Sometimes arms also have some form
of linear motion as well. Each one of these rotational or linear points of actuation
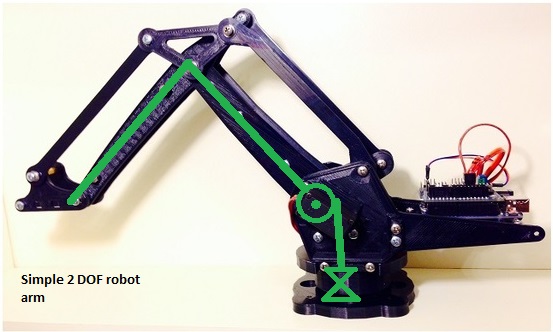
is called a degree of freedom (DOF).
 *from societyofrobots.com
*from societyofrobots.com
Above is an example of a robot that only has two DOF. Even thought it has a pin joint in the middle it does not count as a DOF because the robot can not move independently at that point. The more DOF a robot has the more complicated its movement is. Let's look at a human arm, it has 4 DOF, one at the elbow and three at the socket joint of the shoulder. A robot will not often have so many DOF at one point.