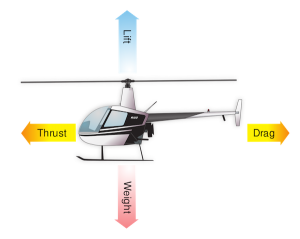
Lift and Flight

Different rotors utilize
different methods for controlled flight. In the
case of a quadcopter which is the most typical
type of multi rotor on the consumer market the
rotors that are opposite of each other spin in
the same direction. By doing this they cancel
out the fuselage torque and make controlled
flight possible without the need for a tail
rotor like a helicopter uses to cancel out the
torque from it's main rotor.
To determine the velocity required by the
rotors to achieve lift off for a multi rotor we
can use the following equation:
Lift = CL*1/2P*V^2*S
where CL = coefficient of lift
P = Density of the multi rotor
V = velocity of the rotor
S = Surface Area