Firstly, there are two basic kinds of electric motors: AC
(alternating current) and DC (direct current).
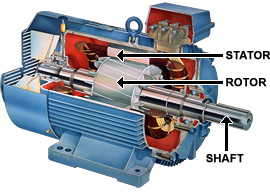
An AC motor consists of two basic parts: an outside rigid piece
called a stator which provides a magnetic field, and a rotor, a
moving piece that provides another magnetic field (How do they
work, MIT). The result is a rotating magnetic
field. This magnetic field "pushes" on the rotor creating a
torque force. The rotor is attached to an output shaft which
delivers the torque to the device attached to the motor. AC
motors use alternating current supplied at 60 Hz (in the U.S.).
The category of AC motors can be broken down further into
induction motors and synchronous motors. Basically, an
induction motor needs a small difference in the speed of the rotor
and the rotating magnetic field (AC Motor, Wikipedia).
This difference is called "slip" and it creates current in the AC
winding (AC Motor, Wikipedia). As a result, if there
is no slip, the motor cannot produce torque. On the other
hand, a synchronous AC motor does not require slip to
operate. Instead, it uses permanent magnets to produce the
needed torque. These motors run faster but also run at a
constant speed (AC and DC Motors, Georgia State Univ.).
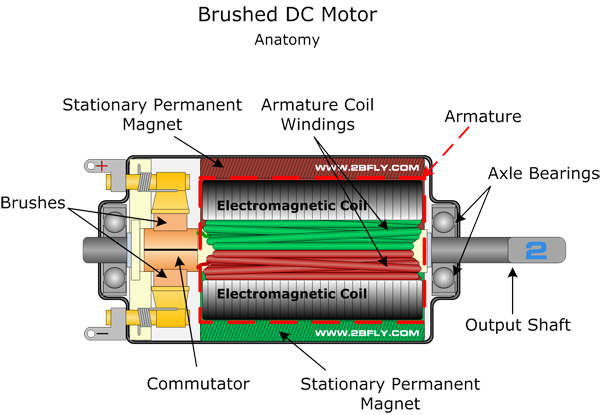
A DC motor is slightly different. They have a stator and a
armature (DC Motor, Wikipedia). This again produces
torque that can be used to power a device, however DC motors can
have their rpm changed by changing the supply of current to them
(unlike AC motors). A DC motor is used in a situation where
the speed at which it operates may need to be changed manually
over time. These motors are typically used in larger
applications such as big machinery. A disadvantage of a DC
motor is that it is usually more expensive and involved to repair
than an AC motor.
image sources:
2bfly.com (Brushed DC Motor)
www.gedigitalenergy.com (AC Motor Diagram)