
Derivation of Euler’s Equations
We first take the equation derived in the relationship between vectors in inertial and rotating frames page, and plug in the angular momentum vector L.
From here, given the following conditions:

Evaluating the cross product and derivative gives the following three equations:
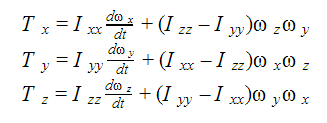
These equations are known as the Euler equations for the
dynamics of a rigid body.
Fixed
Frames and Body Frames
Moment
of Inertia, Principal Moments of Inertia, Inertia Tensor
Relationships
Between Vectors in Inertial and Rotating Frames
Bibliography