Collecting the soil
from the surface of the Moon is very
different than Earth due to the
acceleration of gravity being about
a sixth of the Earth’s gravity (the
Moon’s gravity is about 1.62 m/s^2).
On the Moon, a small rover with a
shovel cannot directly force down
through the regolith like on Earth
because the machine digging would
simply push itself away from the
surface.
Explaination
To overcome this problem, the mining
rover would have to apply the most force
in the x direction instead of the y
direction. The rover’s shovel would need
a rotating drum with shallow wedges to
apply the most soil penetrating force in
the x direction, because there is
another force in the positive direction
produced by the wheel/track’s
friction.
Rotating drums would also allow the
rover to dig deep into the surface
without haveing to extend a digging claw
into the hole.
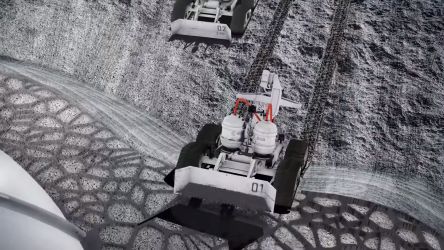
For
example,
the Regolith Advanced Surface Systems
Operations Robot or RASSOR for short (on
the right) has a predicted mass of 45kg,
so if the soil resists a vertical
penetration force greater than 45kg x 1.62
m/s^2 = 72.9N, than the rover would simple
push itself up instead of digging.
Also, to
stabilize itself in the x direction,
RASSOR has two rotating drums which not
only make the two x direction forces
equate to zero, but also provides torque
on each drum to produce two small
downward forces in the y direction.